SYMULACJA UKŁADÓW DYNAMICZNYCH
Kulka i belka
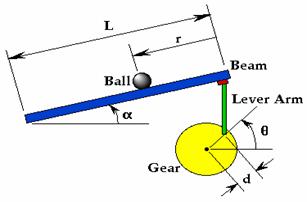
Metalowa kulka stacza się po pochyłej
belce. Belką tą można poruszać, zmieniając jej kąt nachylenia względem poziomu
w sposób pokazany na rysunku.
|
|
Dane:
M - masa kulki - 0.11 kg
d - promień zaczepu dzwigni 0.03 m
R - promień kulki 0.015 m
g - przyspieszenie ziemskie -9.8 m/s^2
L - długość belki 1.0 m.
J - moment bezwł. kulki - 9.99e-6 kgm^2
r - chwilowe położenie kulki
|
tłum. z ang. : beam- belka, ball - kulka, lever arm - ramię dźwigni, gear- silnik |
Zadaniem naszym jest stabilizacja położenia kulki w obecności losowych zakłóceń ( Regulator PID lub sprzężenie od stanu z przemieszczeniem biegunów).
MODEL MATEMATYCZNY:
Równanie ruchu kulki![]() ,
po linearyzacji wokół alfa=0
,
po linearyzacji wokół alfa=0 ![]() .Równanie
wiążące kąt odchylenia belki z kątem obrotu wału silnika można aproksymować
liniową zależnością
.Równanie
wiążące kąt odchylenia belki z kątem obrotu wału silnika można aproksymować
liniową zależnością ![]() .
.
Wynika stąd równanie, ![]() z
którego otrzymamy transmitancję oraz zmienne stanu .
z
którego otrzymamy transmitancję oraz zmienne stanu .
W ćwiczeniu należy:
·
zbudować model
matematyczny (ss i tf),
przeprowadzić symulację sytuacji, w której następuje wytracenie kulki z
położenia równowagi (popchniecie kulki, zmiana kąta nachyleni belki). Co stanie
się z kulką?
·
„dobudować” do układu regulator PID lub PI lub
PD, dobrać jego nastawy tak, aby zapewnić maksymalnie krotki czas ustalania
pozycji kulki.
·
wykonać powyższy
podpunkt dla układu dyskretnego
Dla chętnych / chcących dostać lepszą
ocenę
·
Zaproponować realizację sprzętowo-programową
układu.
·
wyprowadzić model
matematyczny układu, w którym zaczep dźwigni silnika znajduje się w dowolnym
miejscu belki (np. w połowie jej długości, 75%)